Wahrscheinlichkeitsbasierte Modellierung – Unsicherheit verstehen, Systeme beherrschen
Was uns antreibt
Was passiert, wenn ein Auto plötzlich bremst? Oder wenn in der Fertigung winzige Abweichungen auftreten? Unsicherheit ist allgegenwärtig. Probabilistisches Modellieren macht sie berechenbar – und verwandelt Unvorhersehbares in Wissen, das Systeme intelligenter und zuverlässiger macht.
Unser Ansatz
Dafür entwickeln wir bei Bosch neue Methoden, die datengetriebenes Lernen mit ingenieurtechnischem Fachwissen verbinden. So lassen sich Unsicherheiten in Vorhersagen präzise abbilden – etwa beim Verhalten und der Interaktion von Fahrzeugen im Straßenverkehr.
Anwendungsfelder
Die von uns entwickelten KI-Techniken sind überall dort relevant, wo Bosch-Systeme im realen Umfeld präzise modellieren, quantifizieren und verifizieren müssen – etwa in der Fahrzeugtechnik, der Sensorik, der Energietechnik oder der Fertigung.
Design dynamischer Experimente
Informative Daten sind entscheidend für viele KI-Anwendungen. Im Forschungsfeld Design dynamischer Experimente entwickeln wir Methoden zur Datenerfassung an realen Systemen (z. B. Prüfständen) und in virtuellen Umgebungen (z. B. Simulationen).
Dabei kombinieren wir klassisches Design of Experiments (DoE) mit KI-gestützten Verfahren und erforschen probabilistische Datengenerierung für dynamische Systeme mit direktem Praxisbezug.
So entstehen realistische, validierbare und simulierbare Daten, die Entwicklungsprozesse deutlich beschleunigen – vom einzelnen Sensor für Temperatur, Feuchtigkeit oder Gaszusammensetzung bis hin zur Analyse komplexer Systeme wie den Batteriezustand.
Einführung
Datenerfassung und Modelltraining für Sensorsysteme lassen sich vollständig automatisieren – sowohl in der Simulation als auch in der Realität.
Bei Bosch arbeiten wir mit dynamischen Systemen in allen Dimensionen: von einzelnen Sensoren für Temperatur, Feuchtigkeit oder Gaskonzentration bis hin zu komplexen Modellen für Batteriezustand oder Abgasnachbehandlung.
Unsere Werkzeuge ermöglichen:
- automatisierte Datenerfassung
- Modellwahl und Training
- Simulation statt Hardwaretests
Damit steigern wir die Leistungsfähigkeit von Sensoren, ersetzen teure Hardware durch flexible Software und bewerten komplexes Systemverhalten effizient und zuverlässig.
Unsere Forschung
Datengenerierung für hybride Modelle
Informative Daten sind die Grundlage präziser KI-Modelle. Wir erweitern modellbasierte Design-of-Experiments-Verfahren (DoE) um KI-Methoden, um maximal aussagekräftige Datensätze zu erzeugen – beispielsweise für hybride Modelle, die physikalische und datengetriebene Ansätze kombinieren.
Iteratives Lernen dynamischer Systeme
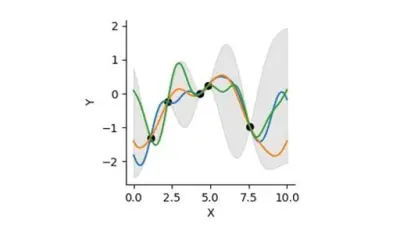
Wir entwickeln ein neuartiges Verfahren zur sicheren, iterativen Datenerfassung an dynamischen Systemen. Dabei setzen wir probabilistische Methoden ein, die physikalisches Fachwissen mit neuesten Lernalgorithmen verbinden.
Sichere Interaktion mit realen Systemen
Bei Experimenten an realen Systemen – etwa am Prüfstand – sind kritische Systembereiche oft unbekannt. Unsere Methoden ermöglichen eine sichere Erkundung der Systemdynamik, potenzielle Risiken werden miteinbezogen.
Automatisierte Prüfstandtests
Unser DoE-Ansatz senkt Kosten und Aufwand bei der Versuchsplanung und -durchführung. Zudem erlaubt er die automatisierte und sichere Steuerung von Prüfständen – bis hin zu Active Learning, das Messstrategien in Echtzeit optimiert.
-
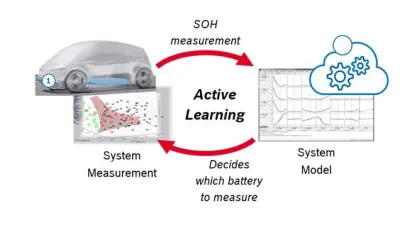
Active Learning für dynamische Systeme: automatisierter Zyklus aus Messung, Entscheidungsfindung und Modellverfeinerung, der Datensammlung optimiert und Systemleistung in Echtzeit-Automotive-Anwendungen verbessert.
Referenzen
Alec Yu, H. S., Yao, D., Zimmer, C., Toussaint, M., & Nguyen-Tuong, D. (2021). Active Learning in Gaussian Process State Space Model. ECML/PKKD. [PDF]
Li, C-Y., Rakitsch, B., & Zimmer, C. (2022). Safe Active Learning for Multi-Output Gaussian Processes. AIStats. [PDF]
Schreiter, J., Nguyen-Tuong, D., Eberts, M., Bischoff, B., Markert, H., & Toussaint, M. (2015). Safe Exploration for Active Learning with Gaussian Processes. ECML/PKKD. [PDF]
Zimmer, C., Meister, M., & Nguyen-Tuong, D. (2018). Safe Active Learning for Time-Series Modeling with Gaussian Processes. NeurIPS. [PDF]
Probabilistische Modellierung für dynamische Systeme
Nur wenn dynamische Systeme unter realen Unsicherheiten modelliert werden, lassen sich praxisrelevante Aussagen treffen – zum Beispiel bei der Analyse von Validierungsfehlern.
Im Schwerpunkt „Probabilistische Modellierung für dynamische Systeme“ entwickeln wir Vorhersagemodelle, die Fachwissen und datengetriebenes Lernen verbinden und Unsicherheiten gezielt berücksichtigen. Dabei lösen wir zentrale Herausforderungen wie effiziente probabilistische Inferenz, unvollständige Messungen und die Quantifizierung von Unsicherheiten.
So entstehen präzise und robuste Modelle, die komplexe Dynamiken realistisch abbilden und die Validierung dynamischer Systeme verbessern. Bei Bosch kommen sie in vielen Bereichen zum Einsatz – etwa in der Automobiltechnik, wo exakte Modellierungen unter realen Bedingungen unverzichtbar sind.
Einführung
Fahrzeuge, die vorausschauend und natürlich auf andere Verkehrsteilnehmende reagieren, werden erst durch datenbasierte probabilistische Prognosemodelle möglich.
Gemeinsam mit den Bosch-Geschäftsbereichen entwickeln wir datenbasierte, probabilistische Prognosemodelle für das Verhalten von Verkehrsteilnehmenden. Diese bilden die Grundlage für Fahrerassistenzsysteme und automatisiertes Fahren der nächsten Generation.
Heute beruhen Fahrerassistenzfunktionen noch auf komplexen Regelwerken und Entscheidungsbäumen, die manuell erstellt werden müssen. Mit steigender Sensorauflösung, wachsenden Datenmengen und zunehmender Funktionskomplexität ist dieser Ansatz jedoch nicht mehr praktikabel.
Unsere Lösung: schlanke Machine-Learning-Modelle, die sich nahtlos in bestehende Software-Stacks integrieren. Damit erhöhen wir die Systemleistung und ebnen den Weg für zukunftsfähige Assistenz- und Automatisierungsfunktionen.
Unser Ziel ist es, das Verhalten von Multi-Agenten-Systemen in realistischen Fahrszenarien exakt zu simulieren und vorherzusagen. Da Fahrdynamik ein stochastischer Prozess ist, erfolgen die Prognosen probabilistisch und erfassen gleichzeitig mehrere mögliche Szenarien.
Unsere Forschung
Genaue Verhaltensvorhersage
Automatisiertes Fahren und moderne Fahrerassistenz erfordern präzise Prognosen zum Verhalten benachbarter Fahrzeuge. Wir entwickeln KI-gestützte Ansätze, die sichere Interaktionen auch in komplexen Verkehrssituationen ermöglichen.
Verständnis der Verkehrsdynamik
Die Interaktion zwischen Fahrzeugen ist hochkomplex und stochastisch geprägt. Unsere Methoden können mit Unsicherheiten umgehen und liefern zuverlässige Vorhersagen für definierte Zeiträume.
Modellierung der Multi-Agenten-Interaktion
Wir entwickeln neue Verfahren mit probabilistischen Modellen – von grafischen Ansätzen bis zu neuronalen Netzen. Diese ermöglichen eine flexible Modellierung beliebig vieler Agenten bei gleichzeitiger Quantifizierung von Unsicherheiten.
Praxisanwendungen
In Kooperation mit den Bosch-Geschäftsbereichen integrieren wir unsere KI-Modelle in reale Szenarien – etwa zur präzisen Vorhersage von Spurwechseln. So schaffen wir die Basis für die nächste Generation von Fahrerassistenz- und automatisierten Fahrfunktionen
-
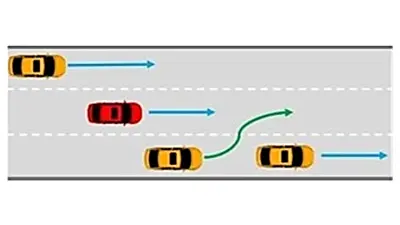
Fahrzeugverhaltensprognose: probabilistische Modellierung von Multi-Agenten-Interaktionen in Verkehrsszenarien, ermöglicht autonomen Fahrzeugen das Antizipieren und Reagieren auf das Verhalten umgebender Fahrzeuge in Echtzeit.
Referenzen
Herman, M., Wagner, J., Prabhakaran, V., Möser, N., Ziesche, H., Ahmed, W., Bürkle, L., Kloppenburg, E., & Gläser, C. (2021). Pedestrian Behavior Prediction for Automated Driving: Requirements, Metrics, and Relevant Features. IEEE Transactions on Intelligent Transportation Systems. [PDF]
Rudenko, A., Palmieri, L., Herman, M., Kitani, K. M., Gavrila, D. M., & Arras, K. O. (2020). Human Motion Trajectory Prediction: A Survey. The International Journal of Robotics Research. [PDF]